Este post mostra como instalar as bibliotecas necessárias para programar o robô de baixo custo no Arduino IDE 2. Vamos usar dois caminhos: (A) adicionar arquivos .zip com as bibliotecas básicas do kit e (B) instalar bibliotecas extras pelo Library Manager do IDE.
🔗 Pacote com as bibliotecas básicas (ZIPs):
Bibliotecas básicas para o robô
Dica: mantenha o Arduino IDE instalado e o suporte ao ESP32 já configurado (Boards Manager). Se ainda não fez, veja nosso guia anterior.
A) Método rápido — Add .ZIP Library
- Baixe as bibliotecas do link acima (arquivo(s)
.zip). - Abra o Arduino IDE → menu Sketch → Include Library → Add .ZIP Library…
- Selecione cada
.zipe confirme. Repita para todas as bibliotecas do pacote (ex.:Acebott.zip,ESP32Servo.zip,IRremote.zip 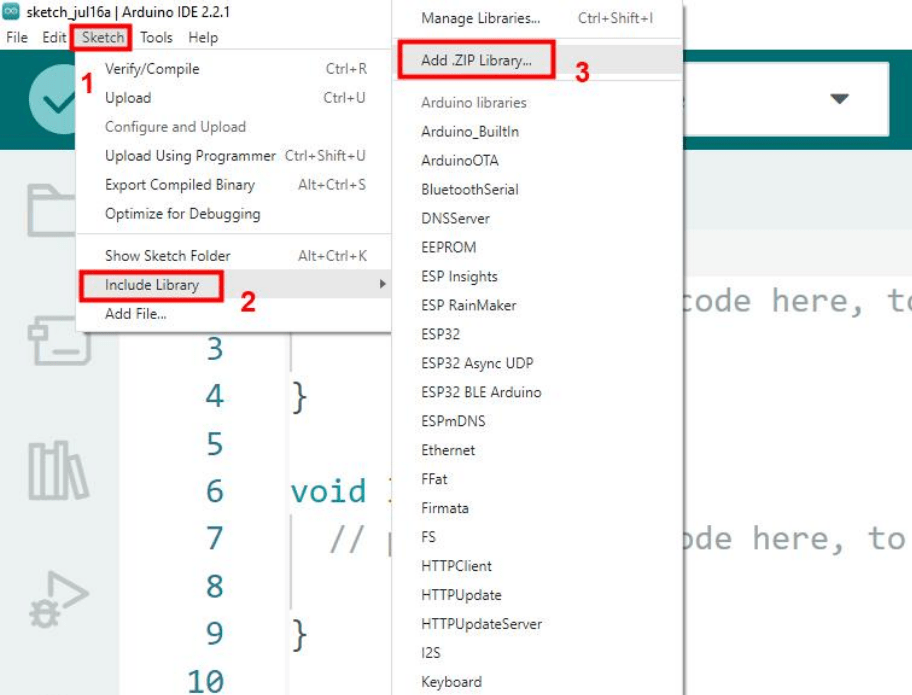 Verifique em Sketch → Include Library se elas aparecem listadas (instalação concluída).
Verifique em Sketch → Include Library se elas aparecem listadas (instalação concluída).

B) Método alternativo — Library Manager (dentro do IDE)
- Abra Tools → Manage Libraries…
- Pesquise pelo nome da biblioteca (ex.: Adafruit NeoPixel).
- Clique em Install e aguarde concluir.
Quando usar qual método?
• ZIP (A): para bibliotecas do kit ou versões específicas que fornecemos.
• Library Manager (B): para bibliotecas públicas (Adafruit, etc.) e manter versões atualizadas.
Conferindo se deu certo
- Abra Sketch → Include Library e verifique se a lista mostra as novas bibliotecas.
- Ao compilar um exemplo que as use (veja abaixo um primeiro exemplo), o IDE não deve acusar “No such file or directory” para os
#include.
C) Exemplo rápido: “ir em linha reta e parar”
A biblioteca do robô expõe uma API de alto nível via vehicle.h. O esboço a seguir é o mínimo funcional para inicializar a placa-mãe do robô, avançar em linha reta por 2 segundos e, em seguida, parar.
O que o código faz
- Inicializa o hardware do robô (
myCar.Init());- Move para frente por 2 s a um duty/nível de velocidade de exemplo (0–255, ajuste conforme sua base);
- Para os motores;
- O
loop()fica vazio (não há comportamento contínuo após o teste).
Código
#include <vehicle.h> // Biblioteca do robô (movimento de alto nível)
// Cria a instância do "carro" (controla a base mecanum)
vehicle myCar;
void setup() {
// 1) Inicialização do hardware (GPIOs, PWM/motores, etc.)
myCar.Init();
// 2) Avançar em linha reta por 2 segundos
// Parâmetros típicos: direção (Forward/Backward/Left/Right/Stop), velocidade (0–255)
myCar.Move(Forward, 120); // Ajuste a velocidade conforme necessário
delay(2000);
// 3) Parar
myCar.Move(Stop, 0);
}
void loop() {
// Vazio: após o teste inicial, não há comportamento contínuo.
}
Dicas de uso
- Velocidade: se o chão tiver muito atrito, comece com um valor mais alto (ex.: 150–180). Se o robô “der arranco”, reduza (ex.: 80–120).
- Tempo: ajuste o
delay(2000)(em milissegundos) para percorrer distâncias diferentes. - Direção: troque
ForwardporBackward,Left,Rightpara validar os quatro sentidos. - Diagnóstico: se nada acontecer, cheque alimentação e porta COM, e faça um teste de “Blink” para confirmar o upload.

Deixe um comentário