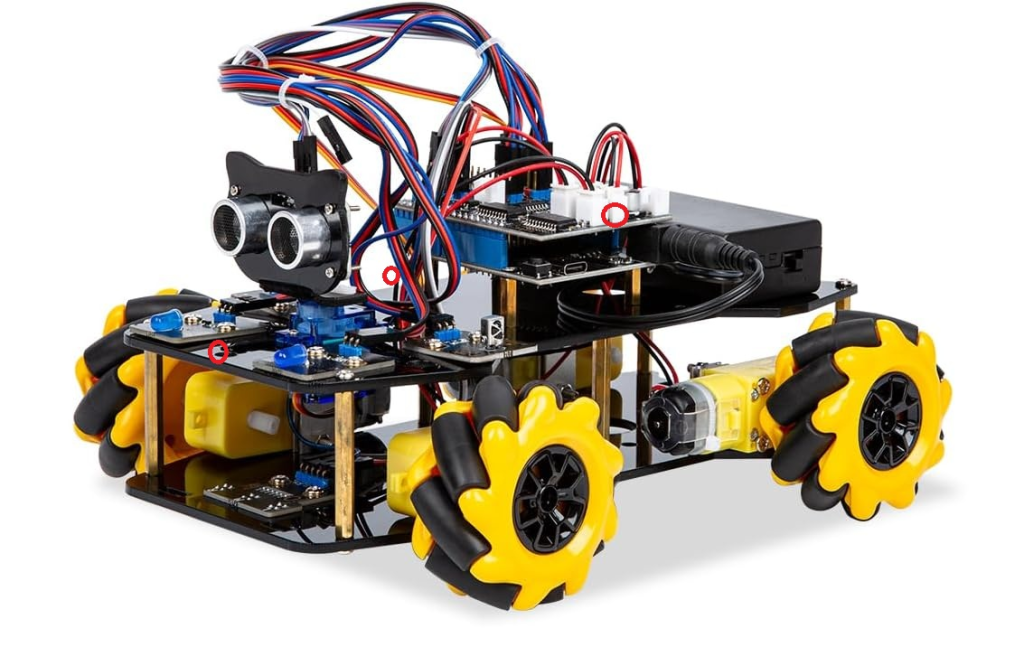
Boas notícias para o Laboratório de Transformação Digital Nova América! Vamos iniciar atividades práticas com um robô móvel de baixo custo em configuração básica, agora equipado com 4 encoders (um por roda) para odometria, sensor de distância por ultrassom e módulo seguidor de linha. A base mecanum (4×4) permite movimentos em todas as direções (frente, lateral, diagonal e rotação) e o ESP32 facilita a programação e a telemetria, perfeito para começar já na primeira aula.
O que a base oferece (setup inicial)
- Controlador: ESP32 (Wi-Fi/Bluetooth), compatível com Arduino IDE/MicroPython; pronto para telemetria e registro de dados.
- Locomoção: 4× rodas mecanum (~6 cm) com movimentos 360°.
- Odometria: encoders para medir velocidade/deslocamento e estimar pose.
- Distância frontal: sensor ultrassônico HC-SR04 para detecção de obstáculos à frente, com leitura em centímetros e limiar de parada/contorno.
- Seguidor de linha: módulo IR (array de sensores refletivos) para detectar linhas pretas/brancas em piso claro/escuro e executar seguimento por controle de erro lateral.
- Expansível: espaço elétrico/mecânico para futuros módulos (sensores ToF/câmera/FPGA) mantendo a mesma base.
Atividades que você já pode desenvolver
- Cinemática e controle de mecanum
– Derivação, implementação e tuning de PID/PI por roda, ensaios de deslocamento lateral/diagonal. - Odometria com encoders
– Pulsos → velocidade/pose, avaliação de deriva e slip em diferentes pisos, comparação entre odometria aberta e com correções simples. - Navegação reativa com ultrassom
– Parada segura por limiar de distância, comportamento de desvio (volta à trajetória após contorno), failsafe para obstáculos imprevistos. - Seguidor de linha
– Calibração do array IR (gama branca/preta); cálculo do erro de linha (método do centróide ou índice ponderado) e controle PID da velocidade diferencial para manter o robô sobre a trilha. - Fusão básica de sensores
– Odometria + ultrassom para aproximação segura do alvo; odometria + linha para trechos híbridos (segue linha, depois executa manobra por posição). - Telemetria e dashboards
– Envio via Wi-Fi, logs de velocidade/erro de tracking, gráficos (tempo de resposta, overshoot, distância mínima ao obstáculo.
Próximos posts trarão mais informações sobre o uso do robô.

Deixe um comentário