Categoria: Robô móvel
-
Fazendo o Acebott girar
Um dos primeiros experimentos interessantes com o robô móvel Acebott é fazê-lo girar sobre o próprio eixo. À primeira vista, o programa parece muito simples: inicializa os motores, manda o robô girar durante um pequeno intervalo de tempo e depois para. Contudo, por trás dessas poucas linhas existe uma organização… Leia mais
-
Instalando as bibliotecas do robô (Arduino IDE) – guia passo a passo
Este post mostra como instalar as bibliotecas necessárias para programar o robô de baixo custo no Arduino IDE 2. Vamos usar dois caminhos: (A) adicionar arquivos .zip com as bibliotecas básicas do kit e (B) instalar bibliotecas extras pelo Library Manager do IDE. 🔗 Pacote com as bibliotecas básicas (ZIPs):Bibliotecas… Leia mais
-

Guia rápido: instalando o Arduino IDE e preparando o ESP32 do robô (Windows)
Abaixo vai um passo a passo enxuto para você instalar o Arduino IDE 2, habilitar o ESP32 no Boards Manager e resolver o ponto mais comum de driver (CH340). No final, você já consegue compilar e enviar um teste para o robô. 1) Baixar e instalar o Arduino IDE 2… Leia mais
-
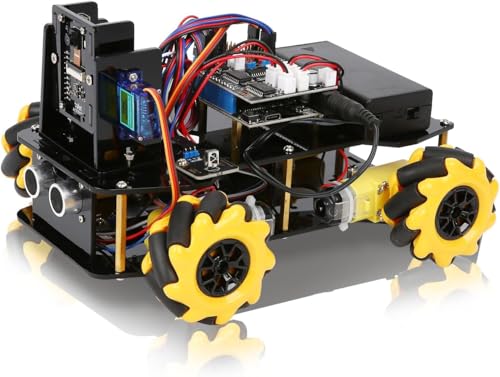
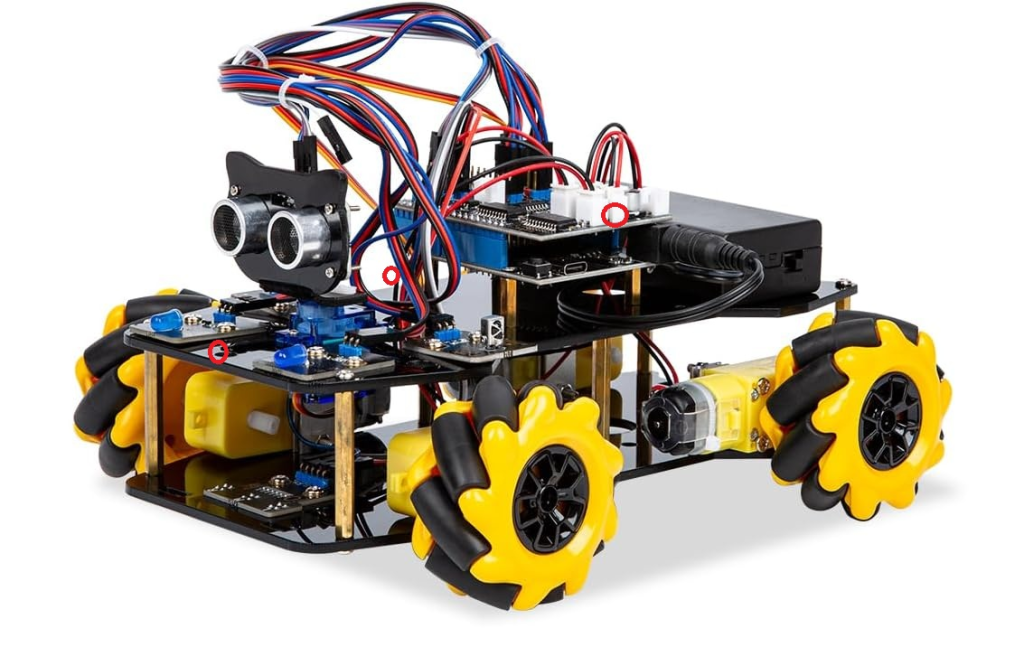
Chegando ao Laboratório: robô móvel de baixo custo (base mecanum) com encoders, ultrassom e seguidor de linha
Boas notícias para o Laboratório de Transformação Digital Nova América! Vamos iniciar atividades práticas com um robô móvel de baixo custo em configuração básica, agora equipado com 4 encoders (um por roda) para odometria, sensor de distância por ultrassom e módulo seguidor de linha. A base mecanum (4×4) permite movimentos… Leia mais
